研究概要
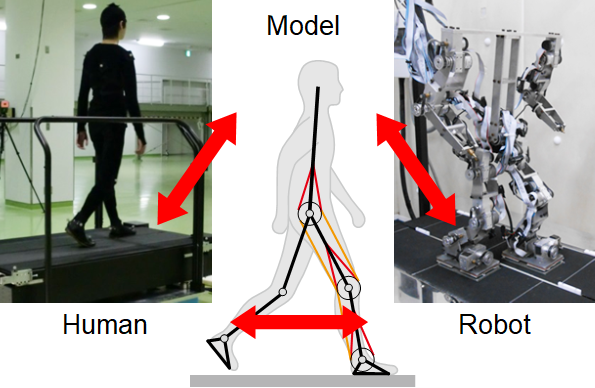
本研究室では、多様な環境で優れた適応能力を示す生物の歩行に着目し、生物の有する優れた運動知能の解明とその応用に関する研究を行っています。 具体的には、生物の運動解析より仮説を立て、計算論的神経科学と生体力学に基づく神経・筋・骨格システムのモデル化と動力学シミュレーション、 そして力学系理論に基づく解析より、生物の優れた運動制御・運動形成メカニズムを数理的に明らかにすることを目指しています。 更には得られた知見を工学的に具現化することで、優れた運動機能を示すロボットの開発を行っています。
ニュース
2026.7.13
7月14日(火)に、Brunel University of LondonのYohan Noh講師による機能創成セミナーを予定しています。詳細はこちら。
2026.7.3
8月16日(日)に、上村知也助教が第12回【おウチで】大阪大学ロボットサイエンスカフェで講演します。詳細はこちら。
2026.6.27
7月28日(火)に、青井伸也教授が京都大学応用数学セミナーで講演します。詳細はこちら。
2026.5.25
M1の木下大輔くんが第70回システム制御情報学会研究発表講演会(SCI'26)において、SCI学生発表賞を受賞しました。詳細はこちら。
2026.4.22
2023年度D3の岡本耕太くん(京都大学からの指導委託)の受動歩行のメタモルフォーシスに関する論文が、Nonlinear Dynamicsより出版されました。メリーランド大学のJames A. Yorke教授、京都大学の國府寛司教授、明石望洋特定准教授、岡山大学の大林一平教授との共著論文です。詳細はこちら。
2026.4.19
4月30日(木)に、青井伸也教授が京都大学のデジタル・グリーン理工学講演会で講演します。
2026.4.1
木村浩先生(京都工芸繊維大学名誉教授)に研究室の招へい教授に就任いただきました。
2026.3.25
B4の橋本峻利くんが本学機械科学コースにおいて、機械工学魁賞を受賞しました。
2026.2.20
M2の岡本蒼生くんが第38回自律分散システム・シンポジウムにおいて、優秀研究奨励賞を受賞しました。
2026.2.12
2024年度M2の西崎航紀くんと安達真永招へい研究員、安部祐一招へい准教授(広島大学)、大島裕子特任研究員のニホンザルの神経筋骨格モデルに関する論文が、eLifeより出版されました。岩手医科大学の中陦克己教授、望月圭講師、鈴木享助教、山口大学の日暮泰男助教との共著論文です。詳細はこちら。
2026.2.9
安部祐一招へい准教授(広島大学)と2023年度留学生のAlvin Soさん(現スタンフォード大学)のスキップの数理モデルに関する論文が、Advanced Robotics Researchより出版されました。詳細はこちら。
2026.1.23
M2の原口雄世くんが第26回システムインテグレーション部門講演会(SI2025)において、優秀講演賞を受賞しました。詳細はこちら。
2025.12.12
M2の原口雄世くんが第26回システムインテグレーション部門講演会(SI2025)において、第21回竸基弘賞 2025年レスキュー工学奨励賞を受賞しました。詳細はこちら。
2025.11.8
朝日新聞の「ののちゃんのDO科学」(2025年11月8日(土)5面)に、青井伸也教授が取材協力した記事「なぜ歩くと左右逆の手足が出る?」が掲載されました。詳細はこちら。
2025.10.8
上村知也助教のシンプルなヒトの歩行モデルに関する論文が、Artificial Life and Roboticsより出版されました。名古屋工業大学の佐野明人教授との共著論文です。詳細はこちら。
2025.8.14
9月17日(水)に、青井伸也教授が第160回ロボット工学セミナーで講演します。詳細はこちら。
2025.7.31
M2の松尾朝日くんがBioengineering Colloquium 2025において、Best Presenter Award (Master course)を受賞しました。詳細はこちら。
2025.7.5
2022年度M2の松山大輝くんと小林洋准教授の静的ストレッチングによる筋の粘弾性の変化に関する論文が、Journal of the Mechanical Behavior of Biomedical Materialsより出版されました。詳細はこちら。
2025.5.10
上村知也助教のヒトや動物のモデルやロボットに関する解説記事が計測自動制御学会の学会誌より出版されました。名古屋工業大学の佐野明人教授との共著論文です。詳細はこちら。
2025.4.1
上村知也助教が着任されました。
2025.3.31
大津創学振PD研究員が、本専攻生物工学講座の助教として栄転されました。
2025.3.31
安部祐一助教が、広島大学大学院先進理工系科学研究科の准教授として栄転されました。
2025.3.24
安達真永招へい研究員の微小重力における歩行走行遷移のシンプルモデル解析の論文がPhysical Review Researchより出版されました。京都大学の土屋和雄名誉教授との共著論文です。詳細はこちら。
2025.3.20
小林洋准教授の筋肉を用いたリザバコンピューティングの論文がIEEE Accessより出版されました。詳細はこちら。
2024.12.19
M1の原口雄世くんが第25回システムインテグレーション部門講演会(SI2024)において、第20回竸基弘賞 2024年レスキュー工学奨励賞の最終候補者に選出されました。
2024.12.4
12月23日(月)に、舞鶴高専の古殿幸大助教による機能創成セミナーを予定しています。詳細はこちら。
2024.11.26
青井伸也教授が第2回阪大NICT合同研究討論会において講演しました。
2024.11.21
青井伸也教授がTwilight Conferenceにおいて講演しました。
2024.11.15
M2の篠原晃大くんがシステム・情報部門学術講演会(SSI2024)において、SSI最優秀発表賞(SSI Best Presentation Award)とSSI研究奨励賞(SSI Young Researcher Award)を受賞しました。詳細はこちら。
2024.10.22
京都大学の古川温馬さん、青柳富誌生教授、海洋研究開発機構の荒井貴光研究員、電気通信大学の舩戸徹郎准教授らとのヒトの体幹-脚間協調の制御に関する共著論文がNeuroscience Researchより出版されました。詳細はこちら。
2024.10.13
安部祐一助教がInternational Topical Workshop on Fukushima Decommissioning Research (FDR2024)において、FDR2024 Selected Papersを受賞しました。詳細はこちら。
2024.10.1
サンパウロ大学のStephanie Chiさんが、交換留学生として研究室のメンバーに加わりました。
2024.9.20
海洋研究開発機構の荒井貴光研究員、京都大学の青柳富誌生教授、電気通信大学の舩戸徹郎准教授らとのヒトの肢間協調の制御に関する共著論文がCommunications Biologyより出版されました。詳細はこちら。(プレスリリース)
2024.8.9
9月17日(火)に、東京大学の太田順教授と安部祐一助教に講演いただく創発システム勉強会2024を予定しています。詳細はこちら。
2024.7.26
M2の西崎航紀くんがBioengineering Colloquium 2024において、Best Presenter Award (Master course)を受賞しました。詳細はこちら。
2024.6.19
FrontierLabサマープログラムで、カリフォルニア大学サンディエゴ校のAlexander Langeさんが、研究室のメンバーに加わりました。
2024.6.3
安達真永さん(三菱電機株式会社リサーチアソシエイト)に研究室の招へい研究員に就任いただきました。
2024.5.27
FrontierLab Miniプログラムで、トロント大学のMai Lyさんが、研究室のメンバーに加わりました。
2024.5.21
6月8日(土)に、青井伸也教授が学士会第55回関西茶話会で講演します。詳細はこちら。
2024.3.6
3月13日(水)に、Polytechnic University of MadridのCecilia García Cena准教授による機能創成セミナーを予定しています。詳細はこちら。
2024.1.9
安部祐一助教が特定非営利活動法人国際レスキューシステム研究機構より、第19回竸基弘賞学術業績賞を受賞しました。詳細はこちら。
2023.12.22
安部祐一助教の流体噴射型浮上索状ロボット(空飛ぶ消火ホース)に関する論文がFrontiers in Robotics and AIより出版されました。秋田県立大学の山内悠特任助教、東北大学の昆陽雅司准教授、多田隈建二郎准教授、田所諭教授との共著論文です。詳細はこちら。
2023.12.5
青井伸也教授が令和5年度基礎工学部談話会において講演しました。
2023.11.22
D3の岡本耕太くん(京都大学からの指導委託)の受動歩行のフラクタルベイスンに関する論文がNonlinear Dynamicsより出版されました。京都大学の國府寛司教授、明石望洋助教、岡山大学の大林一平教授、東京大学の中嶋浩平准教授との共著論文です。詳細はこちら。
2023.11.12
安部祐一助教がシステム・情報部門学術講演会(SSI2023)において、SSI最優秀論文賞(SSI Best Paper Award)を受賞しました。詳細はこちら。
2023.10.2
FrontierLabプログラムで、カリフォルニア大学バークレー校のAlvin Soさんが、研究室のメンバーに加わりました。
2023.9.30
安部祐一助教の空気噴射型索状ロボットに関する論文がJournal of Intelligent & Robotic Systemsより出版されました。秋田県立大学の山内悠特任助教、東北大学の昆陽雅司准教授、多田隈建二郎准教授、圓山重直名誉教授、田所諭教授との共著論文です。詳細はこちら。
2023.9.22
安部祐一助教の流体噴射型浮上索状ロボットに関する論文がIEEE Robotics and Automation Lettersより出版されました。秋田県立大学の山内悠特任助教、東北大学の昆陽雅司准教授、多田隈建二郎准教授、田所諭教授との共著論文です。詳細はこちら。
2023.9.19
小林洋准教授がJSTさきがけICT基盤強化領域に採択されました。詳細はこちら。
2023.9.7
大津創学振PD研究員のヒトのシンプルモデルに関する論文がScientific Reportsより出版されました。東京都立大学の長谷和徳教授、埼玉県立大学の小栢進也准教授との共著論文です。詳細はこちら。
2023.6.20
FrontierLabサマープログラムで、カリフォルニア大学サンディエゴ校のJoshua Tesoroさんが、研究室のメンバーに加わりました。
2023.5.29
2023.5.22
M2の伊庭遼くん(京都大学からの指導委託)が第67回システム制御情報学会研究発表講演会(SCI'23)において、SCI学生発表賞を受賞しました。詳細はこちら。
2023.5.8
6月5日(月)に、Drexel University College of MedicineのSimon M. Danner助教、Shravan Tata Ramalingasetty研究員、Andrew B. Lockhartさんの3名による機能創成セミナーを予定しています。詳細はこちら。
2023.5.1
和田直己先生(山口大学名誉教授)に研究室の招へい教授に就任いただきました。
2023.4.15
2023.4.3
日本学術振興会特別研究員PDの大津創さんが、研究室のメンバーに加わりました。
2023.2.28
D2の岡本耕太くん(京都大学からの指導委託)が2022年度計測自動制御学会学術奨励賞・研究奨励賞を受賞しました。詳細はこちら。
2022.12.21
青井伸也教授がジョージア工科大学の理学部において講演しました。詳細はこちら。
2022.9.8
ホームページを開設しました。
2022.9.1
安部祐一助教が着任されました。
2022.7.13
青井伸也教授が山口大学の共同獣医学部において講演しました。詳細はこちら。
2022.6.22
D2の岡本耕太くん(京都大学からの指導委託)のヒトのシンプルモデルに関する論文がFrontiers in Neural
Circuitsより出版されました。京都大学の國府寛司教授、岡山大学の大林一平教授との共著論文です。詳細はこちら。
2022.6.3
安達真永特任研究員の四脚動物の数理モデルに関する論文がFrontiers in Bioengineering and
Biotechnologyより出版されました。京都大学の松野文俊教授、名古屋工業大学の上村知也助教との共著論文です。詳細はこちら。
2022.5.19
D2の岡本耕太くん(京都大学からの指導委託)が第66回システム制御情報学会研究発表講演会(SCI'22)において、SCI学生発表賞を受賞しました。詳細はこちら。
2022.5.10
多脚ロボットに関する論文がIEEE Transactions on Roboticsより出版されました。詳細はこちら。
2022.4.14
名古屋工業大学の上村知也助教、山口大学の和田直己教授、日暮泰男助教、京都大学の松野文俊教授とのチーターの数理モデルに関する共著論文がFrontiers in Bioengineering and
Biotechnologyより出版されました。詳細はこちら。
2022.4.8
M2の金勇紀くん(京都大学からの指導委託)のネコの神経筋骨格モデルに関する論文がFrontiers in Bioengineering and
Biotechnologyより出版されました。米国・ドレクセル大学のIlya Rybak教授の研究グループ、東京大学の柳原大教授、獨協医科大学の藤木聡一朗講師との共著論文です。詳細はこちら。
2022.4.1
研究室が発足しました。